存储引擎
什么是存储引擎呢?如果说引擎是汽车的核心部件,那存储引擎同样也是数据库的核心部件,它规定了数据存储时的结构、对数据进行增删改查操作的接口,以及索引、锁和其他功能。
存储引擎也有许多不同的分类维度。从对数据的处理方式上来看,主要有两种,OLTP 和 OLAP;而从数据存储的结构上来看,也会分为行存和列存;为了加速数据的查询,又设计出了各种不同的索引结构。
这篇文章,就从这几个角度来分别介绍一下概念、原理和优缺点,在掌握了这些有关存储引擎内部的知识,你就能更好地为自己的应用挑选合适的存储引擎,做出更有效的优化。
本文的大部分内容,来自于《Designing Data-Intensive Application》,好书值得细品。
最简单的存储引擎
如果让你用几行代码来实现一个存储引擎(或者数据库),你会怎么做?
我们可以用 linux 命令来实现数据的读取和写入:
#!/bin/bash
db_set () {
echo "$1,$2" >> database
}
db_get () {
grep "^$1," database | sed -e "s/^$1,//" | tail -n 1
}
写入时,使用 echo 命令将数据以 key - value (键值对)的形式存入文件;查询时,使用 grep 和 sed 命令来获取 key 对应的 value,并用 tail 命令获取最新的一条数据。
这样,我们用两个函数就实现了一个最简单的数据库,可以存入 key - value 结构的数据,而且和很多真正的数据库一样,内部使用 log (日志)数据文件,并且是 append-only(仅追加)的数据文件,而正因为每次写入都是在文本尾部追加,这个数据库有非常不错的写入性能。
但是读取数据的时候,性能就不尽人意了。如果存储的数据量很大,每次使用 db_get() 查询时,必须从头到尾扫描整个数据库文件,时间开销是 O(n) 的,意味着如果数据量翻了 n 倍,查询耗时也要翻 n 倍,这是不能接受的。
为了提升数据库的查询性能,我们需要一个特殊的数据结构:index(索引)。索引就像书本的目录,提前存放了关键的元数据,查询时,就能通过这个目录快速定位到数据的真实位置,而不用通过耗时的扫描来获取数据。本质上,这也是利用空间来换取时间。
索引是一种额外的数据结构,它不会影响数据库中存放的数据,但是,它会影响数据的写入效率。每次写入数据时,还需要更新、维护相关的索引。所以,对于存储系统而言,这是一个非常重要的 trade-off:选好索引可以加速查询,但是索引又会拖慢写入。
Hash 索引
Hash 索引是一个 key - value 数据结构的索引,通常用 hash map 来实现。
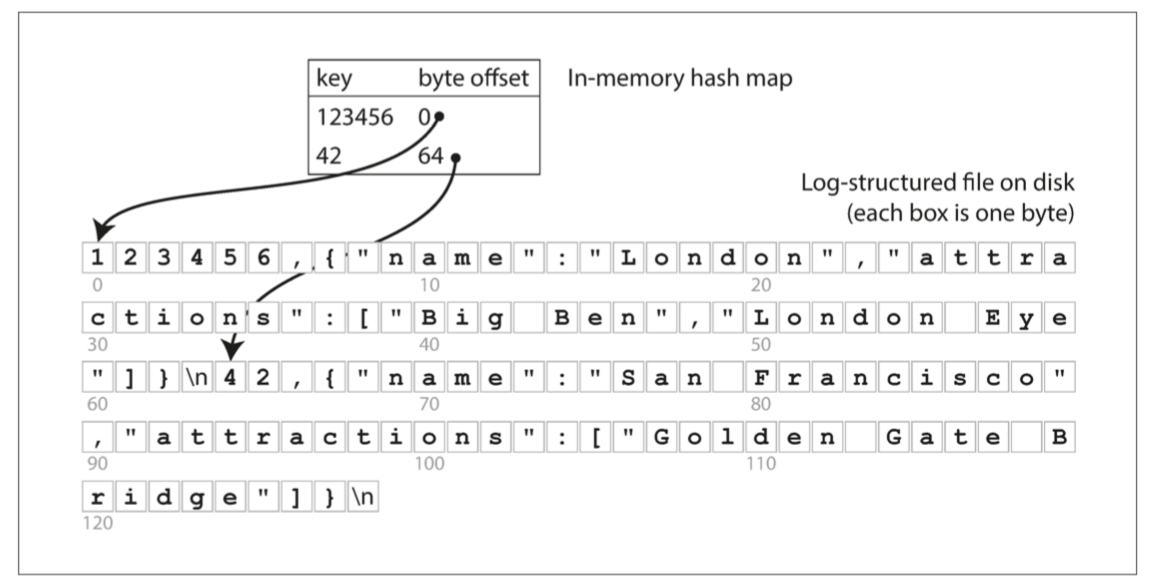
上文中我们使用的小数据库,数据都是在文件末尾不停地追加写入,所以最简单可行的索引策略是:在内存中保存一个 hash map,每个 key 都映射了数据在文件中的字节偏移,也就是在文件中的存储位置。在查询时,通过 key 值能获得位置,就能定位到磁盘上具体的扇区来获取数据。在数据库里写入新的数据时,这个 hash map 也要增加对应的键值。
实际上,分布式 NoSQL 数据库 Riak,默认的存储引擎 Bitcask 就是这么实现的。这种存储引擎,非常适合 value 高频更新的情况,例如 key 是视频的 url,value 是该视频播放次数的统计值,value 会有大量的写入,而 key 值并不是很多,所以可以将整个索引放在内存中。
当然,hash map 索引也有局限性:
- hash map 要存在内存中,而内存又小又贵,因此不能有太多的 key;如果存在磁盘里,查询性能就会大打折扣,有大量的随机 I/O 读取;hash 碰撞也需要复杂的逻辑来处理。
- 范围查询很低效,需要对每个 key 进行独立的查询。
数据的合并与压缩
我们的小数据库,除了查询效率之外,还有一个比较突出的问题。我们的数据在文件末尾不断追加写入,而如果有非常多重复的 key 值,就很浪费磁盘空间,如何避免磁盘被用尽呢?
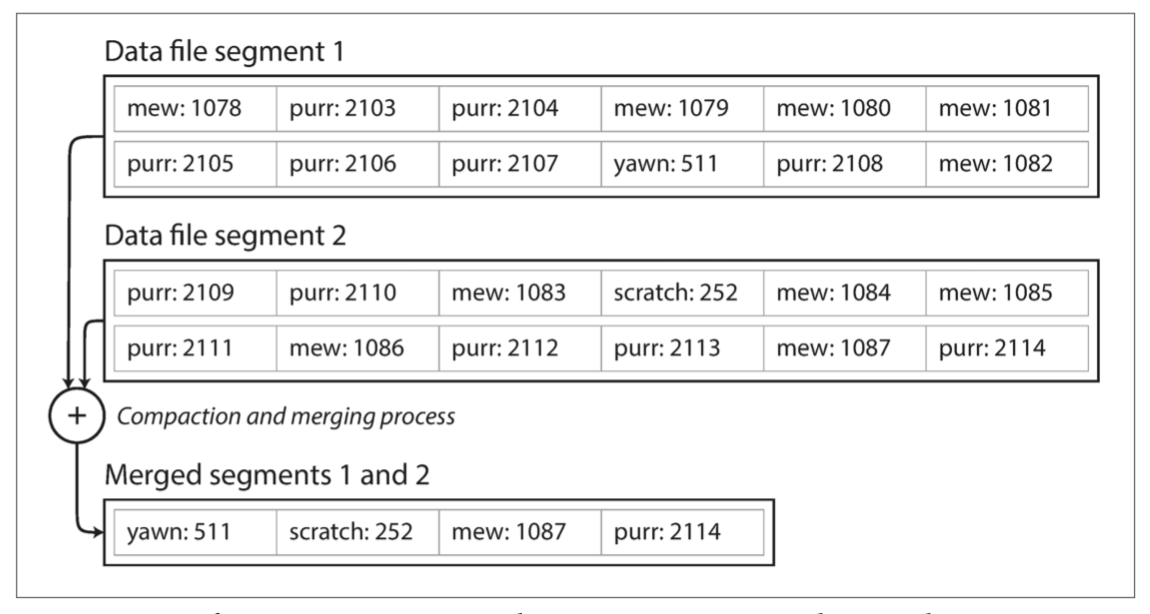
我们可以使用分段文件(segment file),当数据文件达到指定大小后,新建一个文件来继续写入,而旧的文件可以进行压缩,丢弃重复 key,仅保留最新的值。经过压缩后的分段文件会变得很小,而且多个分段文件又可以合并在一起。这个合并、压缩的过程可以使用后台线程来运行,不会影响当前的写入。
针对每一个分段文件,都有对应的在内存中的 hash map,每次查询时,先从最近一个分段文件的 hash map 开始,如果没找到对应的 key,就再往前。合并操作能有效降低分段文件的数量,所以通常不会有太多次的查询。
这个方法看起来简单,但如果想实际应用的话,还有许多东西需要考虑。例如文件的格式、崩溃后快速恢复、并发控制等等。
OLTP 和 OLAP
在业务应用系统中,一次数据写入,通常都是因为有一次交易行为,例如创建一笔交易订单,支付一笔费用。如今,系统的使用场景已经不仅仅是金钱相关的领域了,例如在博客上留下一条评论,或是游戏场景里的一次动作。但是 transaction(交易/事务)这个术语仍旧沿用至今,通常用于描述一组读写操作构成的逻辑单元。而这种面向业务、用户的数据访问模式,被称为 OLTP (OnLine Transaction Processing,在线事务处理)。
相对应的,随着大数据时代的来临,数据库更多也被用于数据分析。与事务处理不同,数据分析往往需要扫描大量的数据,用于计算、汇总和统计,这种数据访问模式,被称为 OLAP(OnLine Analytical Processing,在线分析处理)。
比较一下两者的特点:
| 属性 | 事务处理系统 OLTP | 分析系统 OLAP |
|---|---|---|
| 主要读取模式 | 查询少量记录,按键读取 | 在大批量记录上聚合 |
| 主要写入模式 | 随机访问,写入要求低延时 | 批量导入(ETL)或者事件流 |
| 主要用户 | 终端用户,通过 Web 应用 | 内部数据分析师,用于决策支持 |
| 处理的数据 | 数据的最新状态(当前时间点) | 随时间推移的历史事件 |
| 数据集大小 | GB ~ TB | TB ~ PB |
以上,我们了解了存储引擎中,索引、分段文件的概念,以及 OLTP、OLAP 这两种不同的使用场景,接下来,我们一起来看看,如何基于这些概念来构建高性能、高可靠的存储引擎。
OLTP 中的存储引擎
LSM-tree
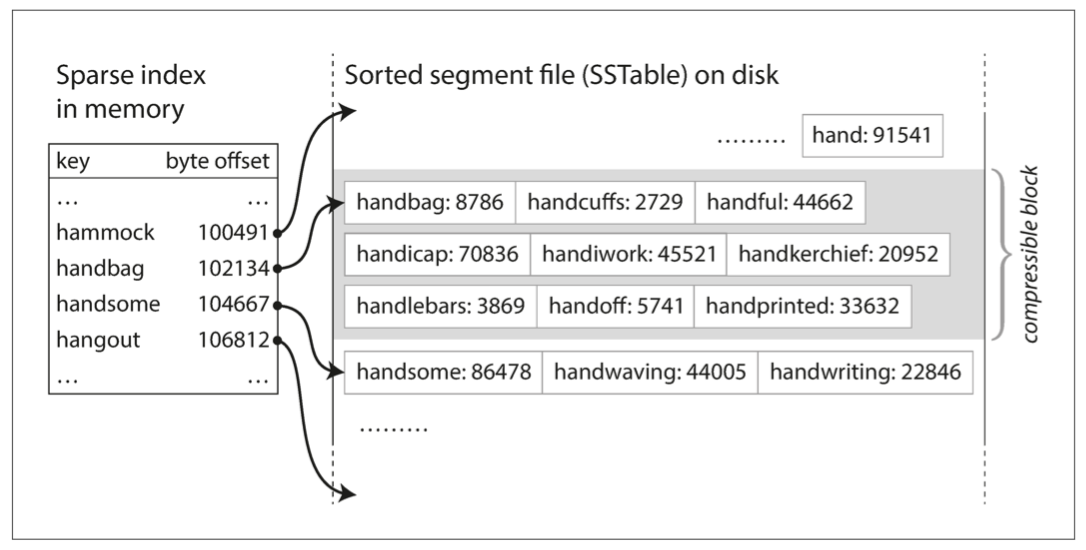
上文讲述了分段文件 segment file,如果我们稍微改动一下结构,将存储的健值对数据按 key 来排序,就形成了 SSTable(Sorted String Table)。
相比于使用 hash 索引的 segment file,SSTable 有以下好处:
- 合并操作可以更简单高效,类似于归并算法,如果多个分段中有重复的 key,取最新分段的值即可
- 进一步节省内存空间,不再需要把所有的 key 都存放在内存中,因为 key 排序后,保留部分的 key 就能完成查询
- 同样也可以减少磁盘空间,因为 key 按序排列,对应的数据也可以排序后压缩写入磁盘中,key 指向的是磁盘区块的开头
数据的写入是无序的,那要如何保证 key 值的有序呢?我们都知道,在磁盘里维护一个有序结构是非常困难的事,但是在内存里就相对容易。有许多树结构可以使用,例如红黑树和 AVL 树,使用这些树来保证任意顺序的写入,而在读取时有序。
于是把上述方法结合起来,存储引擎可以这样运行:
- 写数据时,把数据先存入内存中的平衡树结构(例如红黑树),这个树也被称为 memtable(内存表)
- 当内存表的大小超过阈值(一般是 MB 量级),就写入磁盘中的 SSTable 文件,即最新的分段文件。树中已经维护好了数据的顺序,所以写入 SSTable 非常高效,完成后就可以生成新的内存表
- 读数据时,先尝试从内存表中获取,然后是最新的分段文件,再一路往前查询
- 后台线程可以合并、压缩分段文件,擦除重复或者已删除的值
- 如果数据库崩溃了,内存表会丢失,为了避免这个问题,可以保存一个写入日志,仅在崩溃恢复时使用,内存表写入 SSTable 后,关联的日志就可以删除
这种索引结构由 Patrick O’Neil 等人提出,被命名为 LSM 树,这种基于合并和压缩排序文件原理的存储引擎就是 LSM 存储引擎。
为了进一步提升 LSM 存储引擎的性能,还有许多细节的设计。
例如,LSM-tree 在查询不存在的 key 时,效率很低,得一路查完所有文件才能确定 key 不存在。为了优化这种查询,存储引擎通常会使用额外的布隆过滤器(Bloom Filters)。
还有一些不同的策略来决定 SSTable 排序、合并、压缩的时机。最常见的是 size-tiered 和 leveled compaction。size-tiered 是指较新、较小的 SSTable 会被合并入较旧、较大的 SSTable 中,而 leveled compaction 是指将较旧的数据移入单独的层级(level),使得压缩可以增量进行,节省磁盘空间。
所以,LSM-tree 的核心思想是:保存一系列在后台合并的 SSTable,简单又高效。即使数据远远大于内存,也可以保持运行。数据按序存储,可以支持高效的范围查询,在磁盘上又是顺序写入,LSM-tree 可以支持非常高的写入吞吐。
B-Trees
B-tree 是目前使用最多的索引结构。它也是健值对的形式,但是和 LSM-tree 相比,是截然不同的设计哲学。
LSM-tree 将数据拆分为可变大小的分段,通常是 MB 量级,按顺序写入;而 B-tree 则是将数据拆分为固定大小的页(或者叫区块 block),通常一页的大小是 4KB,一次只读写一页。这个设计更贴近于底层的硬件,磁盘就是固定大小的区块。
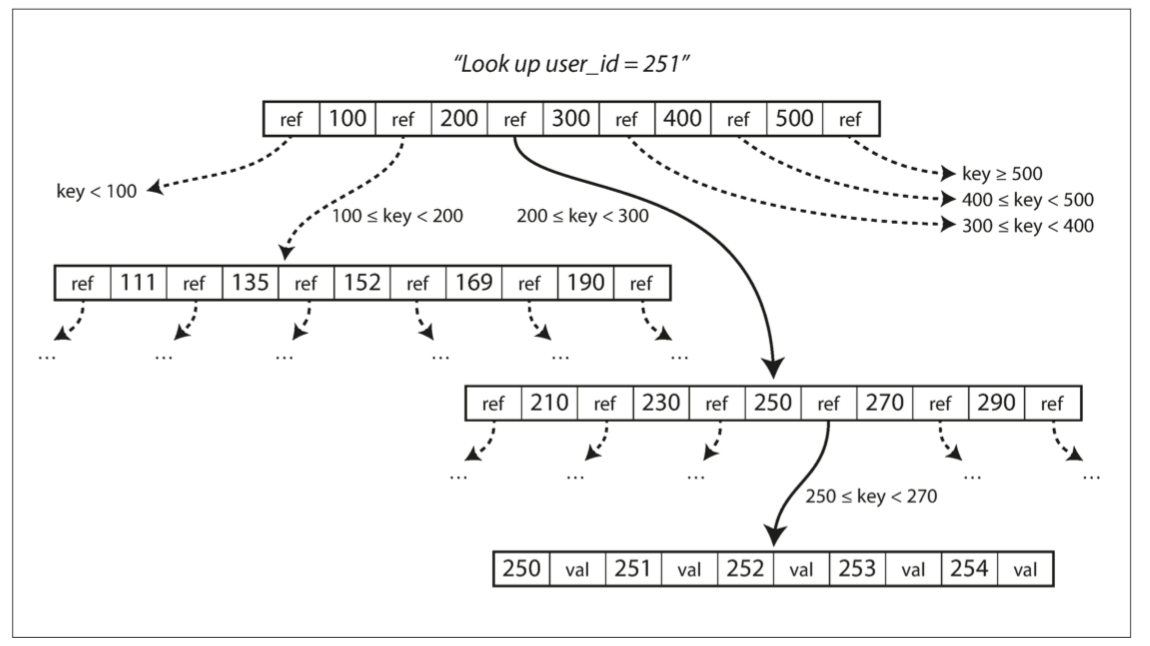
每一页都有另一页的地址引用,指向另一页所在磁盘的位置,有点像指针,就可以通过页之间的引用来形成树结构,有一页是根,每次查询都是从这个根开始。页中有许多的 key,每一个子页都负责了一定范围内连续的 key,key 之间的差值就表明了数据的范围。页中还有许多子页的引用,子页的数量被称为分支系数(branching factor),通常是数百的量级。
如果想要更新一个 key 对应的值,首先要找到存有这个 key 的页,更改 value,再将整个页写回磁盘。如果想要新增一个 key,同样先找到 key 所在范围的页,往里面插入 key;如果页中没有足够的空间来插入 key,就会将这一页拆分为两个半页,父页也要更新 key 的范围。
这个算法保证了树的平衡,即一个包涵 n 个 key 的 B-tree,深度为 O(log n)。例如一个 4 层,每页大小 4 KB,分支系数为 500 的树,可以存储 256TB 的数据。所以大部分数据库中的 B-tree,深度为 3 或者 4,不需要经过太多次的引用就能找到对应的页。
可靠的 B-tree
覆盖更新页数据是磁盘操作,而如果写入的同时造成了页分离,一次更新就需要磁盘多次旋转、写入,要是这时候数据库崩溃了,该怎么办呢?
为了保证数据库在崩溃时也可靠,通常会在磁盘里增加一个额外的数据结构:WAL(write-ahead-log,话也被称为 redo log)。这个仅追加的文件保存了 B-tree 在真正更新页数据及其自身前的所有修改日志,当数据库在崩溃后启动,可以用这个日志来使 B-tree 复位到与先前一致的状态。
更新页面时,多线程同时访问 B-tree 也是需要考虑的问题,否则不同线程能读取到不一致的数据,通常使用 latches(轻量级锁)来保存树的数据结构。LSM-tree 则不必担心这点,后台的合并操作并不会影响查询。
B-tree 的优化
B-tree 有很多变体,最常见的就是 B+ tree。
在 B+ tree 中,内部页只存有 key,key 只需要提供足够的信息来充当键范围之间的边界,页中也就能存放更多的 key,减少树的层级。数据都存放在最底层的页上,并且有链指针,可进行快速的范围查询。

比较 LSM-tree 和 B-tree
简单来说,LSM-tree 写入更快,而 B-tree 查询更快。

LSM-tree 的优势
一次更新,使用 B-tree 索引的话,至少得写入两次数据。第一次是 WAL 日志,为了崩溃恢复,第二次才是页本身的数据,而且页更新的时候,整个页都得覆盖写入。
一次数据库的写入导致磁盘的多次写入,这种情况被称为写扩增(write amplification)。使用 SSD 时要考虑这种情况,因为 SSD 的区块会磨损,写入次数是有限的。
对于重写入的应用,性能的瓶颈很可能是数据库写入磁盘的效率,所以写扩增会直接影响性能。
虽然 LSM-tree 在压缩、合并 SSTable 时也会有多次写入,但是相比较于 B-tree,写扩增更少,并且是顺序写入 SSTable 文件,而不是不像 B-tree 中的页是覆盖更新,这对于机械硬盘来说比较重要,因为顺序写入比随机写入快得多。
另外一点,得益于 LSM-tree 的压缩,所以在磁盘上的文件占用空间也比 B-tree 少,B-tree 的页分裂也会导致磁盘上有难以利用的碎片化的空间。
LSM-tree 的劣势
LSM-tree 的合并操作带来了不少好处,同时也带来了一些影响。这个操作可能会影响到读写操作。磁盘的资源是有限的,一个请求可能需要等待磁盘完成合并操作。磁盘的带宽也是固定的,对于一个空数据库,全部的带宽可以用来初始写入,而随着数据的增加,更多的带宽会用于合并操作。
如果写入的吞吐很高,并且没有配置好合并的频率,和有可能造成合并赶不上写入。没有合并的分段会持续扩增,直至磁盘用尽,查询也会因为要回溯更多的分段而变慢。
B-tree 的优势就在于索引中的 key 存在唯一且固定的位置,而 LSM-tree 的 key 可能存在多个分段中,这有利于 B-tree 实现强事务语义,例如在很多关系型数据库中,事务隔离就是通过锁住一定范围的 key 来实现的。
OLAP 中的存储引擎
OLTP 是面向业务,通常会要求高可用与低延迟,所以就需要单独的数据库来用于数据分析,也就是数据仓库。
数据仓库内,存储了业务数据的只读副本。从 OLTP 数据库中提取数据(定期数据转储或是流处理),转换成可用于数据分析的模型,清理并加载进数据仓库中,这个过程也就是 ETL(extract - transform - load)。
星型模型
我们知道在 OLTP 中有许多数据模型,例如关系型、NoSQL、图,但是在 OLAP 中,数据模型就比较少,现在数据仓库使用的通常是基于关系模型的星型模型(或称为维度模型)。
在进行事务处理时,会产生事实数据,事实表(fact table)的每一行就代表了在特定时间发生的事件,一部分列是属性,另一部分列是对其他表(称为维度表 dimension table)的外键引用,维度表代表了事件的对象、内容、地点、时间、方式和原因(who, what, where, when, how and why)。
而“星型模型(star schema)”这个名字的来源,就是将这些关系变成可视化来看,事实表被维度表包围在中间,这些表的关系就像星星的光芒。
星型模型有一个变体,是雪花模型(snowfalke schema),就是将维度表进一步拆分成更细粒度的子维度表。雪花模型比星型模型更规范,但是也更复杂,所以星型模型是首选。
列式存储
如果事实表中的数据有上亿行,甚至 PB 级的大小,高效率的存储和查询将会是一个巨大的挑战。
并且事实表通常由超过 100 个字段列,但是典型的数仓查询只会访问其中的 4 个或者 5 个字段列,该如何优化查询效率呢?
大部分 OLTP 数据库中,都是行存储模式,即表中的每一行数据相邻存储在一起,NoSQL 也是一样的连续字节序列。如果字段很多、数据量很大,每次查询都需要先把这些数据从磁盘加载到内存中,解析并过滤掉不需要的属性,会浪费很多时间和空间。
所以就诞生了列式存储,不是将每一行内的数据存在一起,而是将每一列的值存在一起。每一列的数据单独存在一个文件中,查询只需要读取列所对应的文件,可以节省大量的工作。
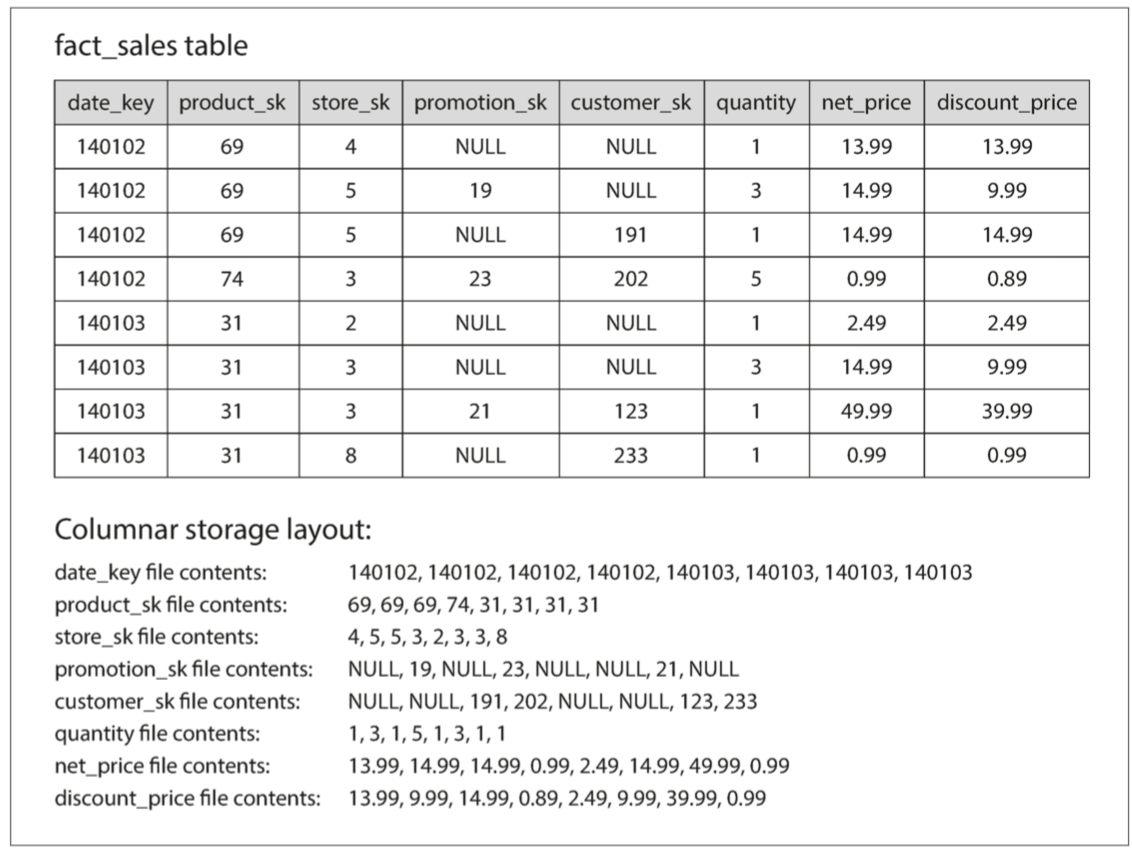
在列式存储中,行之间的关系依赖于每一行的顺序,例如想要查询第 7 行完整的数据,就可以从每个列文件中获取第 7 个值,组合起来形成完整的第 7 行数据。
除了减少每次查询加载的列之外,还可以通过压缩数据来进一步提升效率。列式存储很适合进行数据压缩,也有很多不同的压缩技术,比较有效的是位图编码。
列式存储和压缩,有效提高了数据查询的效率,但是写入也变得困难。如果想在压缩后的列文件内增加一行记录,就得重写所有的列文件,因为插入必须对所有列进行一致的更新。
其实上文已经提到了一个很好的解决方案:LSM-tree。所有的写操作先写入内存表,维护到一个已排序的结构中,准备写入磁盘。此时,内存表中采用行存储或是列存储都可以,达到阈值后,与磁盘中的列文件合并,批量写入新文件即可。
总结
在本章中,从一个最简单的小数据库入手,逐步了解数据库中是如何存储、检索数据的,并了解了针对不同场景优化的存储引擎。
从数据的使用角度来看,分为 OLTP 和 OLAP。OLTP 面向业务和用户,对实时性和可靠性的要求比较高,通常一次查询只会获取少量数据,硬盘查找时间往往会是瓶颈;OLAP 则是用于大数据的分析,查询量和频率会低于 OLTP,但是单次查询所获取的数据量和查询开销会很高,这种情况下,磁盘带宽会成为瓶旧,所以使用列式存储来解决。
在 OLTP 场景下,又会分为两个主要的派系。一种是日志结构派,只允许追加到文件和删除过时的文件,但不会更新已经写入的文件。Bitcask、SSTables、LSM-tree、LevelDB、Cassandra、HBase、Lucene 等都属于这个类别;另一种是就地更新派,将硬盘视为一组可以覆写的固定大小的页面。 B-tree 是这种理念的典范,用在所有主要的关系数据库和许多非关系型数据库中。
因为篇幅有限,还有很多索引结构并没有来得及介绍,例如用于全文检索的索引,甚至将所有的数据都放在内存中,存储引擎内部也有大量细节的设计和内容可以去了解。
当然,本章的目的,是为了让你掌握基本的概念,来帮助你为自己的应用,挑选合适的存储引擎,为性能优化提供思路。
Reference
《Designing Data-Intensive Application》